自动导引运输车作为现代智能物流与柔性制造系统的核心装备,其导航方式的演进与计算机系统集成的深度直接决定了AGV系统的智能化水平与应用边界。目前,市场上主流的AGV导航技术主要有三种:磁导航、激光导航与视觉导航,它们与计算机系统的集成方式和复杂度各有不同。
一、磁导航:经典可靠的“轨道跟随者”
磁导航是最早实现规模化应用的AGV导航技术之一。其原理是在地面铺设磁条或磁钉,形成预定的物理路径,AGV车体底部的磁传感器持续检测磁场信号,通过计算机控制系统(通常是嵌入式工控机或PLC)对信号偏差进行解算,进而驱动转向电机进行纠偏,实现沿轨精确行驶。
- 系统集成特点:
- 路径固定,控制简单:路径规划在铺设时即已固化,中央调度系统(上位机)只需下达起点和终点的任务指令,无需复杂的实时全局路径计算。
- 高可靠性,低成本:对环境光线、灰尘不敏感,抗干扰能力强。系统架构相对简单,集成与维护成本较低。
- 灵活性差:路径变更需重新铺设磁条,难以适应动态变化的生产布局。
- 计算机系统角色:主要承担基础的循迹控制、交通管理(通过地标识别实现站点停靠、岔路选择)以及与上位机的通信任务。
二、激光导航:高精灵活的“环境测绘者”
激光导航通过AGV车顶的激光扫描器(LiDAR)发射激光束并接收由环境中的反光板或自然特征(如墙壁、立柱)反射回来的信号,通过三角几何或SLAM(同步定位与建图)算法,实时计算出AGV在全局地图中的精确位置(位姿)。
- 系统集成特点:
- 无需地面改造,路径灵活:通过软件即可随时修改、优化行驶路径,柔性化程度高。
- 定位精度高:通常可达±10mm甚至更高,适合对精度要求严苛的场合。
- 系统集成复杂度高:是计算机软硬件深度集成的典范。
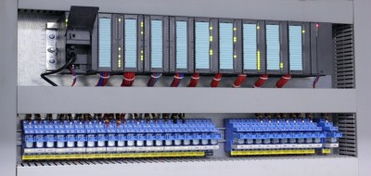
- 硬件层:高性能激光雷达、工业计算机(IPC)或嵌入式控制器是标配。
- 软件层:核心在于导航算法软件(如SLAM算法包)、路径规划引擎(常采用A、D等算法)以及地图管理模块。这些软件通常运行在车载计算机或集中服务器上。
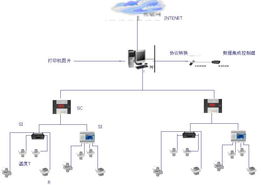
- 系统层:需要与WCS(仓库控制系统)、MES(制造执行系统)等上层管理系统深度对接,实现任务下发、状态监控、交通智能调度(多车协同、动态避障)。
- 成本较高:对激光传感器和计算单元的性能要求高,初始投资较大。
三、视觉导航:智能感知的“场景理解者”
视觉导航主要借助摄像头(单目、双目或鱼眼)采集环境图像信息,通过计算机视觉算法(如特征点提取、模板匹配、深度学习)识别地面二维码、纹理或直接进行自然特征SLAM,从而实现定位与导航。
- 系统集成特点:
- 信息丰富,潜力巨大:摄像头能捕获海量的环境信息,为更高级的智能决策(如识别不规则货物、复杂避障)提供可能。
- 成本与性能的平衡点多样:
- 二维码导航:类似磁导航的离散点路径,但路径更改更方便(更换/张贴二维码),系统集成难度相对较低。
- 自然特征SLAM导航(无标识导航):这是当前的前沿方向,完全依赖算法从复杂环境中提取和记忆特征。它对计算机系统的算力要求极高,通常需要集成高性能嵌入式GPU或与边缘计算服务器协同。算法开发、系统调试的集成复杂度是三者中最高的。
- 环境适应性挑战:对光照变化、地面纹理、动态遮挡等较为敏感,需要鲁棒性极强的算法和大量的数据训练来保证稳定性,这对系统集成的软件工程能力提出了严峻考验。
与展望
从计算机系统集成的视角看,AGV导航技术的发展史,正是一部从“硬连接”到“软定义”、从“集中控制”到“边缘智能”的演进史。磁导航代表了专用、稳定的经典集成模式;激光导航体现了以精确传感器和确定性算法为核心的高性能集成模式;而视觉导航则昭示着以人工智能和强大算力为驱动的未来智能集成模式。
在实际的系统集成项目中,选择何种导航方式,必须综合考虑场景的柔性需求、精度要求、环境条件、投资预算以及整个AGV系统与上层业务系统(ERP/MES/WMS)集成的整体架构。多传感器融合导航(如激光+视觉)将成为主流,这对计算机系统的异构计算能力、实时数据融合与通信架构提出了更高的集成要求,也是AGV系统集成商核心竞争力的重要体现。